“Ship fast, fail fast” is easy to chant when you are pushing code to a cloud service. It gets harder when every iteration means a new PCB spin or CNC fixture. I have recently been interested on formal techniques to…
“Ship fast, fail fast” is easy to chant when you are pushing code to a cloud service. It gets harder when every iteration means a new PCB spin or CNC fixture. I have recently been interested on formal techniques to…
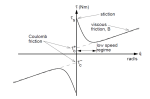
Minimising the stiction will improve the resolution of your force controlled application.
This time I would like to review the most used online shops to buy components for a robotic design. Some of them are more focused on the professional market and some others pay attention to the hobbyist. The two main…
Encoders, whether rotary or linear, absolute or incremental, typically use one of two measuring principles—optical or magnetic. While optical encoders were, in the past, the primary choice for high resolution applications, improvements in magnetic encoder technology now allow them to…
The simplest velocity estimation method is the Euler approximation that takes the difference of two sampling positions divided by the sampling period. Typically the position measurements are taken with encoders or resolvers which contain stochastic errors which result in enormous…
Main telerobotic platforms
Hi! In this post I will explain the method for obtaining a set of equations to be able to identify the dynamic model of robot composed by several links even in presence of closed loops. In the previous post I detailed…
Two lines are showed in the upper image of this video. In blue, the estimated total force and in red, the measured force. This video shows how the Luenberger-Sliding observer manages to estimate external forces during a compression task. Sliding…
In this post I describe the initial steps to identify the parameters of a robot with either open or closed chain.
In this post, a review of the main effects due to the radiation on telerobotics systems is performed in order to justify the approach I took during my research and clarify the issues found. Due to the radiation levels in most…




































