A beginner roboticist should learn the basics of a few type of technologies and components before embarking himself in the design and construction of his own robot. I would say that the main areas one should be familiar with are:
- Electric motors: it is important to distinguish the types and to know the basics of operation of the most used motors, e.g. DC brushed, DC brushless, PMSM, steppers, servos, etc. In a typical project, very frequently, one has to select the proper motor for an application and possibly the combination of motor and gearbox. I have published a very useful guide to select an electric motor for a simple robotic application. (https://enriquedelsol.com/2017/11/19/motor-selection-for-robots-i/).

Brushless motor
- Motor controllers: the motors need to be powered and controlled with the right hardware, typically based on a H bridge made of transistors. It is important to understand the very basics of motor control to avoid spending a considerable amount of money in unnecessary hardware.
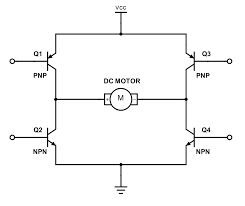
H bridge
- Sensors: in robotics, it is a must to know the different sensors that can provide positional feedback, such as encoders, resolvers, potentiometers. Some of them will be needed depending on the motor we select for our application. In the simpler scenario of choosing servomotors, position sensors will only be needed as a backup sensing method. Other types of sensors very common are: temperature sensors, force sensors, velocity sensors (tachometers), linear displacement, light sensors, etc. It is very important to measure distance, in order to map the environment or to avoid obstacles. The most common sensors to measure distance are: infrared sensors (relatively inexpensive), ultrasonic sensors (inexpensive as well), lasers and depth cameras. These can measure the distance on a large interval to which they have been calibrated for. For an accurate distance detection, there are switches based on capacitive and inductive technology, very reliable but only available for fixed distances. Other common sensors that are used during the electronic control are current sensors and voltage meters.
Potentiometer
Resolver

Encoder
- Batteries: the roboticist should become familiar with different battery technologies such as LiPo (Lithium Polymer), Ni-Cd (Nickel Cadmium), Ni-MH (Nickel-Metal Hydride), etc. They all have different energy density, charging requirements, price and availability.
- Power transmission. Usually, the torque required for an application cannot be obtained with a direct drive motor, and a gearbox should also be incorporated in the design. It is crucial to know how to select the tandem motor-gearbox depending on the application requirements.
- Mechanical parts. This includes the structural elements and the locomotion elements if a mobile robot is being designed. It is very common the use of simple structural elements like aluminium profiles to save on manufacturing costs and time. Wheels, feet and additional mechanical elements are also very important depending on the locomotion capabilities of our design.
- End effectors: In order to interact with the environment and carry out assigned tasks, robots are equipped with tools called end effectors. These vary according to the tasks the robot has been designed to carry out. For example, robotic factory workers have interchangeable tools such as paint sprayers or welding torches. Mobile robots such as the probes sent to other planets or bomb disposal robots often have universal grippers that mimic the function of the human hand.
- High level controllers. They are used to run the clever algorithms. It is important to distinguish between a micro-controller and an application processor. The first one will require embedded programming and the second one can be programmed similarly to a personal computer. Usually the later ones can run a simplified version of Linux. Both of them should have inputs and outputs to interface with the hardware.
- Manufacturing. It is always good to become familiar with the usual manufacturing techniques in order to be able to design effectively our own components. There are companies specialised in rapid prototyping that will be willing to manufacture individual units for us. Some examples are Protolabs and Hubs.
- 3D printing. Nowadays, the 3D printers are available for everybody and one can buy a very good printer at a reasonable price. For this reason, it is always convenient to learn the basics of designing and printing setup. It sometimes can be slightly frustrating the first encounters with a new 3D printer, as they are not as easy to operate as a conventional 2D paper printer.






































Leave a comment