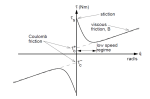
Minimising the stiction will improve the resolution of your force controlled application.
Minimising the stiction will improve the resolution of your force controlled application.

A beginner roboticist should learn the basics of a few type of technologies and components before embarking himself in the design and construction of his own robot. I would say that the main areas one should be familiar with are:…
This time I would like to review the most used online shops to buy components for a robotic design. Some of them are more focused on the professional market and some others pay attention to the hobbyist. The two main…
Encoders, whether rotary or linear, absolute or incremental, typically use one of two measuring principles—optical or magnetic. While optical encoders were, in the past, the primary choice for high resolution applications, improvements in magnetic encoder technology now allow them to…
Electrical noise is a common problem that occurs during the transmission of an incremental encoder’s signal to the receiving electronics, especially when the cable lengths are very long. Stray electromagnetic fields or currents induce unwanted voltages into the signal. These…
The trend towards wide scale use of Brushless Motors is being driven by manufacturing cost reductions, improved efficiencies, greater reliability, availability of improved drive electronics, and the availability of improved sensors for motor control. The brushless motors, independently whether they…
Thanks to the Elsevier guys I have a link to get free access to my recently published paper: on the control performance of motors driven by long cables for remote handling at ITER. It has been published in the journal:…
In this post, a review of the main effects due to the radiation on telerobotics systems is performed in order to justify the approach I took during my research and clarify the issues found. Due to the radiation levels in most…




































