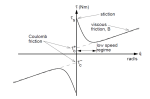
Minimising the stiction will improve the resolution of your force controlled application.
Minimising the stiction will improve the resolution of your force controlled application.

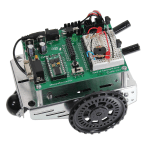
A beginner roboticist should learn the basics of a few type of technologies and components before embarking himself in the design and construction of his own robot. I would say that the main areas one should be familiar with are:…
This time I would like to review the most used online shops to buy components for a robotic design. Some of them are more focused on the professional market and some others pay attention to the hobbyist. The two main…
Encoders, whether rotary or linear, absolute or incremental, typically use one of two measuring principles—optical or magnetic. While optical encoders were, in the past, the primary choice for high resolution applications, improvements in magnetic encoder technology now allow them to…
Analise the correct parameters that must be taken into account when selecting a motor is crucial for the success of the application.




































