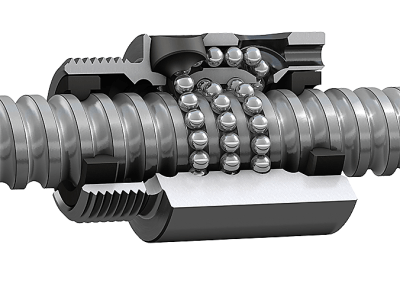
In previous posts we have discussed about the causes of the non-backdrivability in robotic actuators, the efficiency of most common reducers and the conditions under which a ballscrew becomes backdrivable. Here we will take a closer look into the effects of the non-backdrivability into the force control.
We can distinguish two types of non-backdrivability:
A.) Inherent non-backdrivability
B.) High friction/inertia/gear ratio caused backdrivability
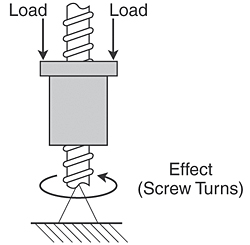
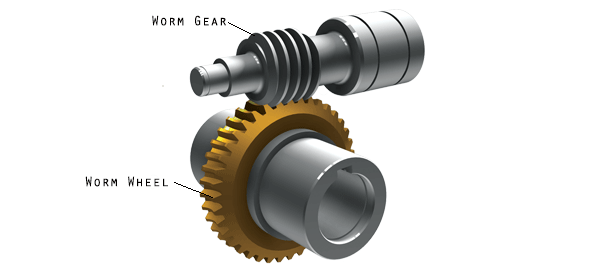
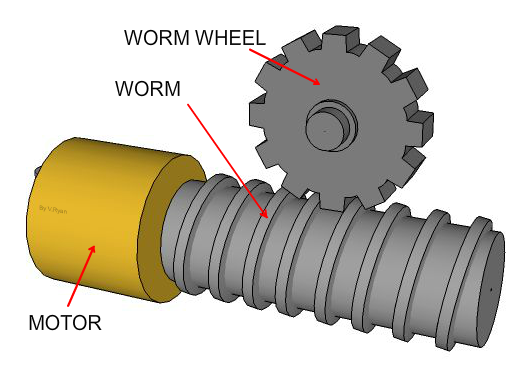
The best example of inherent non-backdrivability is the worm gear mechanism although there are many. In this case, the movement can only be produced in one sense but not in the opposite. The worm can displace the worm wheel but the opposite is not possible due to mechanical constraints.
The second case is more subtle. A transmission with high friction could make the backdriving force very high and create a non-backdrivable mechanism. This could be the case of very inefficient transmissions that require excessive force to be actuated. Excessive actuator’s inertia is also an issue as the backdriving force needs to fight against that inertia when accelerating the mechanism. Finally, the gear ratio, which is tightly coupled with the inertia. The inertia of the load as seen by the motor corresponds to the following formula:
JTotal_motor = ( JLoad / N2 ) + JMotor
It is obvious that the higher the gear ratio (N), the lower the perceived inertia for the motor. However, for the sake of analysing the backdrivability we are interested on the opposite, i.e. the motor inertia as seen by the load which is where the backdriving force is applied. In this case, the term N2 changes and multiplies the JMotor as per this:
JTotal_load = JLoad + JMotor* N2
Following this, the inertia on the load is proportional to the motor inertia times the square of the gear ratio, then, increasing the gear ratio is very detrimental for the backdrivability. As a rule of thumb a gear ratio higher than 10:1 is considered non-backdrivable.
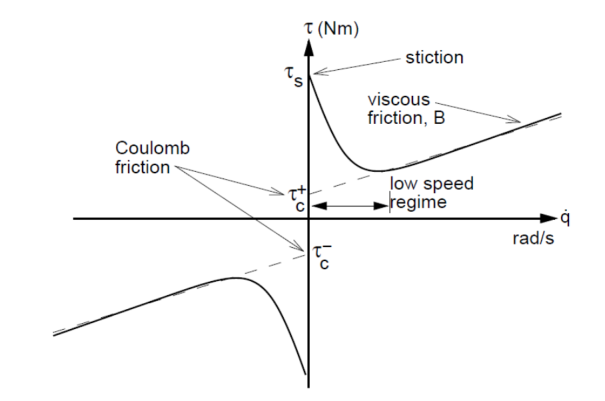
However, in this post I wanted to focus on the effects of friction on the force control. Friction models are very complex, but a widely used approximation is given by this model that considers stiction, coulomb friction and viscous friction.
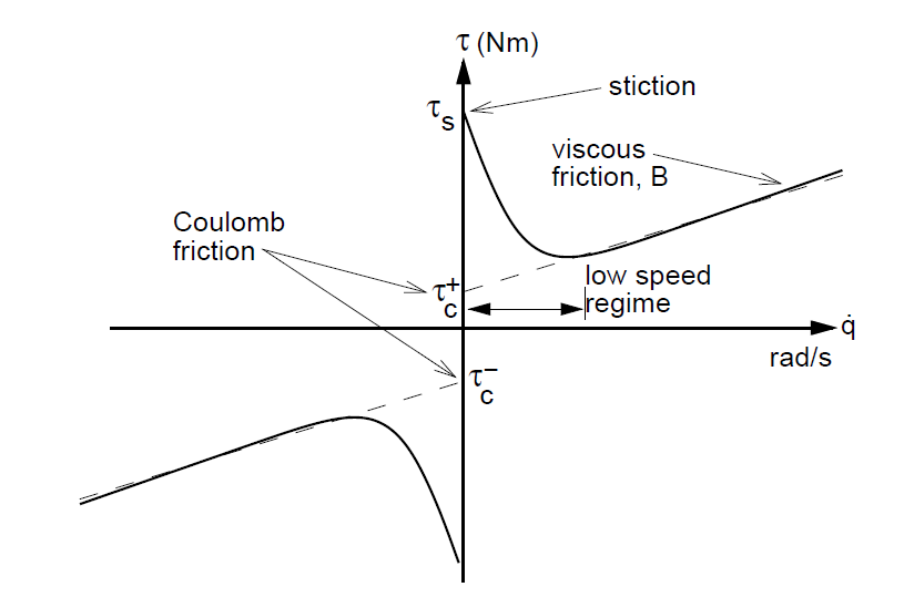
Whenever we want to maximise the backdrivability we should consider minimising the stiction as it is the cause of frequent control issues.
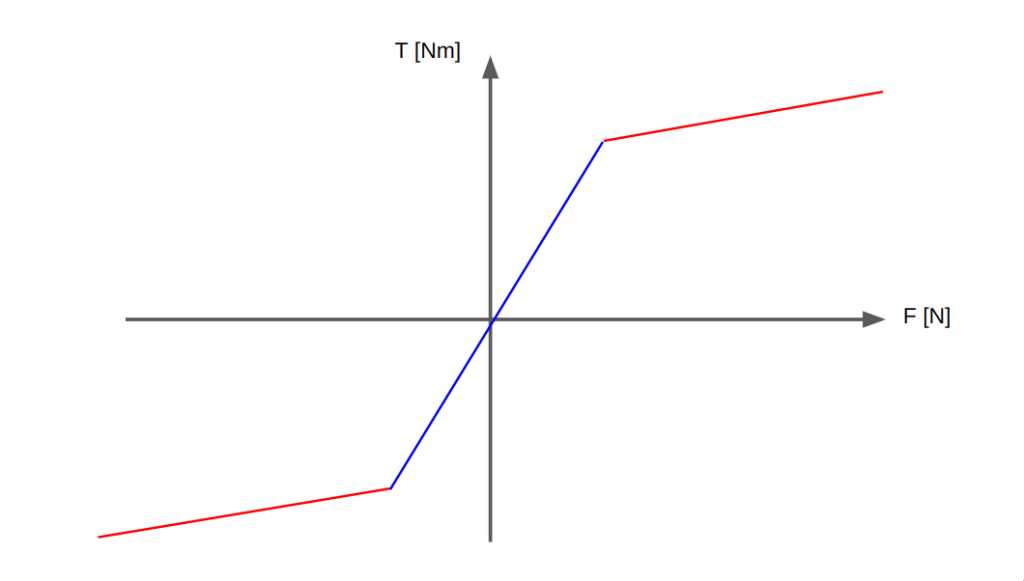
On the graph below we can see the effect of the stiction on the output force of a mechanism. The stiction acts as a dead zone of the actuators torque by eating up all the torque produced without causing any output force until the stiction is overcome. F[N] is here the output force of the mechanism whereas T[Nm] is the motor torque.
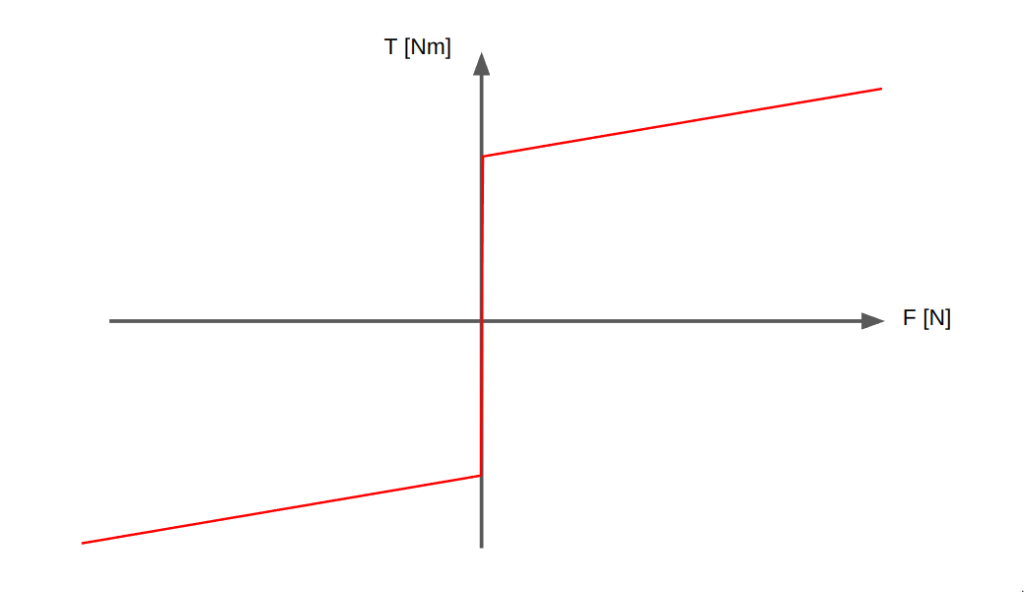
There are two problems caused by the stiction and both related to the difficulty of model such effect. It is never possible to achieve a 100% accurate model of the actuator’s friction, and even if a long time is invested on obtaining such a perfect model, things may change, temperature may change causing the grease to vary its state, and hence affect the friction, calibration may change, wearing of the mechanism can influence your model, etc.. In the case of an inaccurate model and high stiction, a high motor torque is required to produce very low force, and hence, any model errors would be amplified and cause high output force errors. In addition to that, in the proximity of zero force, a constant switching of high torque would be produced, causing undesirable behaviour on the actuator.
It is certain that this curve could be smoothed out, obtaining something like this:
However, this does not solve all of our problems as small torque errors would cause high force errors, deteriorating our control performance at the output. We can then consider that the range of output forces where the stiction is present, limits the resolution of our force controlled application.
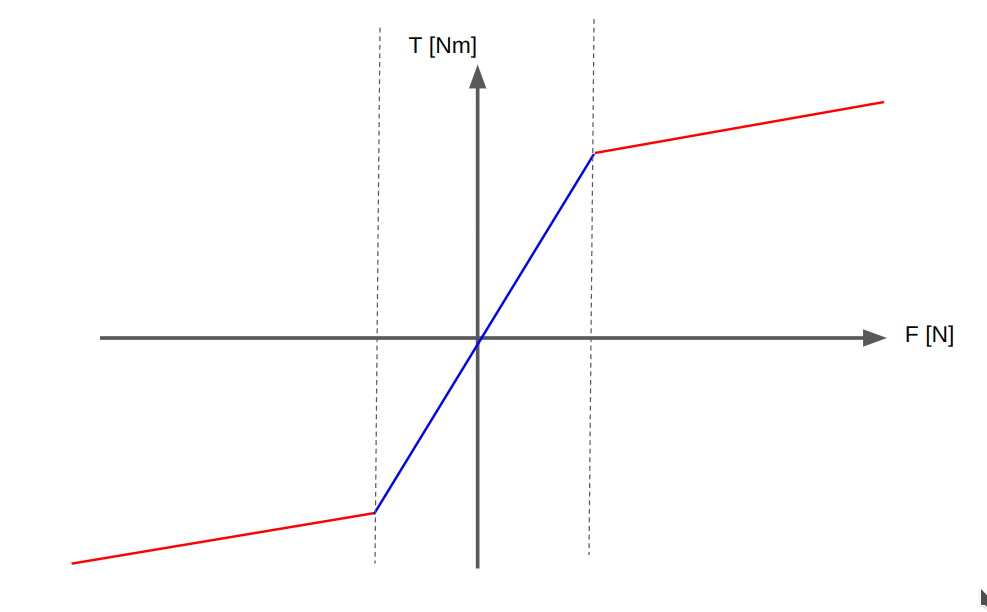
The sticion is not only present when low forces are applied. What governs the stiction is the speed as shown in the first graph. Everytime the speed is close to zero, the stiction enters into the game. Even controlling our output force at high forces, if this is done at very low speed, we have a problem. Our force control resolution gets deteriorated by the stiction band.
Then, by minimising the stiction we would be improving the performance of our force controlled application. We can do this by designing conveniently our mechanism, reducing the number of elements that cause friction, ensuring the correct alignment of the mechanical components, adding lubricant to the system, etc.