 Enrique del Sol – Robotics, Mechatronics & Control Research
Portfolio, Robotics Research Blog, Meeting Point & Showcase of Ideas
Enrique del Sol – Robotics, Mechatronics & Control Research
Portfolio, Robotics Research Blog, Meeting Point & Showcase of Ideas
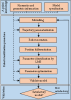
Process of obtaining a robot model
‹ Return to Dynamic modelling of robots: parameters identification (I)

Process of obtaining a robot model
Share this:



Leave a comment